



对称式布置锚链系统的线性化处理
陈徐均1 , 崔维成1 , 沈 庆2
(1 .上海交通大学船舶与海洋工程学院, 上海 200030 ;2 .解放军理工大学工程兵工程学院, 江苏 南京 210007)
摘 要:用悬链线方程求解了不同锚链状态的锚链力, 并用多项式回归了锚链力与锚固点位移的关系, 由此求得锚链恢复力刚度系数。分析了对称式布置锚链系统的非线性程度, 阐述对称式布置锚链系统所提供的恢复力作线性化处理的可行性及方法, 并给出了对称布置锚链系统的线性刚度矩阵。为各类受对称式布置锚链系统约束的浮动结构物的动力分析提供了理论依据。
关键词:对称;锚链系统;非线性;线性
中图分类号:O353 文献标识码:A
4 应用分析
以浮体的水弹性分析为例, 设第j 根单链的锚固点位移可表示为:

式中:[ t] j 为单链坐标系与平衡坐标系间的坐标转换矩阵, 可表示为:
式(8)中(x′j , y′j , z′j )为浮动结构上第j 个锚固点坐标, u0k (x′j , y′j , z′j)和pk (t)分别为第j 个锚固点的第k阶位移振型[ 4] 和浮动结构水弹性振动的第k 阶主坐标。
平衡坐标系中对称式布置的锚链系统提供的锚链恢复力的第r 阶分量为:
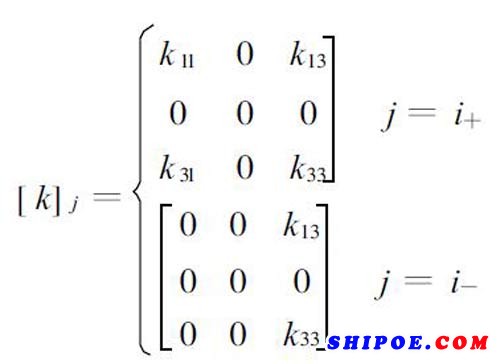
式中:J 为锚链总根数, Cmrk 为锚链恢复力刚度矩阵的元素, 可表示为:

式中:[ k] j 根据j 取值的不同有如下形式:
求得了锚链系统的线性刚度矩阵后, 可直接加入自由浮体的水弹性运动方程, 建立受对称式布置锚链系
统约束的浮体的水弹性运动方程如下:
[ a +A] {p}+[ b +B] {p}+[ c +C +Cm] {p}={E}
式中:[ a] 、[ b] 、[ c] 分别为浮体干结构的广义质量矩阵、广义阻尼矩阵和广义刚度矩阵, [ A] 、[ B] 、[ C] 分别
为流体的广义附加质量矩阵、广义附加阻尼矩阵和广义静水恢复力矩阵, {p}为主坐标列阵, {E}为波浪激励
力等外力列阵, [ Cm] 即为本文推导的线性锚链恢复力刚度矩阵。显然, (13)式可在频域内求解。
5 结 语
在海上浮体动力响应分析中, 锚链力的处理是解决问题的关键之一。本文在忽略锚链与浮体运动间的动力耦合的前提下, 针对对称式布置锚链系统, 提出了一种将非线性锚链力问题化为线性问题来解的方法,并论述了其可行性, 使得受非线性约束的浮体的动力问题同样可以在频域内求解, 大大简化了受对称式布置锚链系统约束的浮体的动力分析。
推荐阅读:对称式布置锚链系统的线性化处理(一)